

Konspekt Roobotika
1. Mis on robot? Maailma esimene robot.
Robot on mehaaniline intelligentne seade, mis on võimeline iseseisvalt või välise abiga (inimese poolt) ülesandeid lahendama.
Maailma esimesed robotid ehitati eelmise sajandi 60-ndatel aastatel tehase tootmistöö jaoks. Kõige
esimeseks robotiks loetakse 1961. aasta kevadel tööd alustanud General Motors’i autotehase robotit
nimega Unimate.
2. Robotite arendamis põlvkonnad. Nimeta ja seleta.
Esimene põlvkond. Esimese põlvkonna robotid olid lihtsa ehitusega ning neil puudus ümbrusetaju ehk andurid. Oma tööd suutsid nad teha vaid mittemuutuvates tingimustes.
Teine põlvkond. Teise põlvkonda kuuluvad robotid (vt joonis 2), mis suudavad andurite läbi reageerida keskkonnas toimuvatele muutustele.
Kolmas põlvkond. Kolmas põlvkond on veel väljatöötamisel. Kolmanda põlvkonna robotid suudavad olukordi analüüsida ning õppida.
Nõudepesumasin -> Teine põlvkond
Fikseeritud liikumisega robotkäsi -> Esimene põlvkond
Automaatselt süttiv lamp -> Teine põlvkond
Ise keeli õppiv robot -> Kolmas põlvkond
3. Miks manipulaatorid ei ole robotid?
Manipulaatorid ei ole robotid, kuna neid juhib vahetult inimene.
4. Mis on masinate eelised võrreldes inimtööjõuga?
Robotid ei ole töötingimuste suhtes nii tundlikud kui inimesed, neid saab kasutada müra- ja halva valgustusega töökohtades, samuti kohtades, kus inimese töö võib olla ohtlik kiirguse või teiste tegurite tõttu. Roboteid kasutatakse ka seal, kus inimesed ei saa töötada, näiteks ookeanipõhja või Marsi uurimisel.
5. Millised kolm tingimust peavad olema täidetud, et teatud masinat või seadet saaks robotiks nimetada?
1) Robot ei tohi oma tegevuse käigus või tegevusetusega inimesele viga teha.
2) Robot peab täitma inimese käsklusi, kui need pole vastuolus esimese seadusega.
3) Robot peab kaitsma oma olemasolu, kuni see ei lähe vastuollu esimese ega teise seadusega.
6. Millistes Eesti tööstusettevõtetes võiksid mehhatroonikud töötada?
- Masin-nägemine
- Robootika
- Automaatika
- Andur-sensorsüsteemid
- Autotööstuse rakendused
- Elektroonika
Robot – mehaaniline intelligentne seade, mis on võimeline iseseisvalt või välise abiga (inimese poolt) ülesandeid lahendama.
Robootika – teadus- ja tehnoloogiavaldkond, mis tegeleb robotite projekteerimise, arendamise ja rakendamisega.
Manipulaator – seade või masin, mida inimene juhib.
Mehhatroonika – mitmekesine tehnikateaduste haru, mis ühendab endas mehaanika, elektroonika,arvutitehnika, tarkvaratehnika, juhtimisteooria ja süsteemidisaini, eesmärgiga jõuda välja parema toote loomiseni.
Andur -seade, mis mõõdab mingit suurust ning teisendab selle elektriliseks signaaliks.
Täitur – seade mis teostab mingit operatsiooni, näiteks põhjustab liikumise
Kontroller – väike arvuti, mida kasutatakse protsesside või masinate juhtimiseks. Selleks on kontrollerile laaditud inimese koostatud programm.
Arduino Uno komponendid
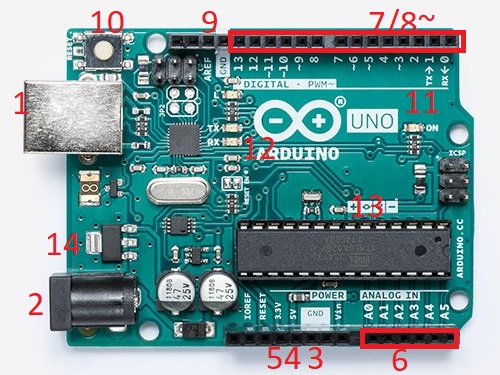
- USB pistik (USB – Universal Serial Bus) port. USB pistiku abil saab Arduino arendusplaadile voolu anda ja programmikoodi laadida. Arduino kasutab USB B tüüpi pistikut./Разъем USB (USB Порт) – Может использоваться для питания схем, а также для связи с компьютером.
- Voolupesa. Voolupessa saab ühendada voolujuhtme, millega Arduinole voolu anda. /Разъем Питания (от батареи) – Может использоваться с блоками питания 9 – 12 Вольт.
- GND (GND – ground, eesti k maandus) pesad. Nende pesade kaudu käib vooluringi maandamine.
- 5V (V – volt) pesa. 5V pesa kaudu saab arendusplaadi külge ühendatavaid lisakomponente varustada 5 voldise vooluga.
- 3,3V pesa. 3,3V pesa kaudu saab arendusplaadi külge ühendatavaid lisakomponente varustada 3.3 voldise vooluga.
- Analoogpesad (A0-A5) loevad signaali analoogsensoritest ja teisaldavad selle digitaalkujule, mida programm saab lugeda ja pärast signaali töötlemist digitaalpesa kaudu väljastada. Analoogpesa on võimalik vajadusel kasutada ka signaali väljastamiseks./Порты (Analog In, Power In, Ground, Power Out, Reset) – аналоговые, входящие, исходящие, питание и земля.
- Digitaalsed pesad (D0-D13). Nende abil saab lugeda ja väljastada digitaalsignaali. 15
- Pulsilaiusmodulatsiooni (Pulse-Width Modulation (PWM)) pesade abil saab simuleerida analoogväljundit./Порты (ARef, Ground, Digital, Rx, Tx) – опорное напряжение, земля, цифровые порты, порты приема и передачи данных.
- AREF pesa abil saab vajadusel lisapesana lugeda kindla tugevusega analoogsisendit.
- Lähtestamise nupp (Reset button) – Lähtestamise nupu vajutamisel taaskäivitatakse Arduino arendusplaadile laetud lähtekood. Kui programmi töö on katkenud saab nupu abil programmi taaskäivitada. Samuti on nupp mugav viis testimiseks, kui on tarvis koodi mitu korda jooksutada saab seda teha nupule vajutades. /(сброс) – ручной перезапуск платы Arduino, приводит к перезапуску вашей программы.
- Toite LED (LED – Light-emitting Diode) tuli. Toite LED tuli läheb põlema, kui Arduino arendusplaat on ühendatud vooluvõrguga. Kui pärast vooluga ühendamist tuli ei lähe põlema, on oht, et arendusplaadiga on midagi valesti./Индикатор (Индикатор питания) – сигнализирует о подаче питания на плату Arduino.
- TX (TX – Transmit) RX (RX – Receive) LED tuled – Nende LED tulede abil on aru saada, kui arendusplaat võtab andmeid vastu või saadab neid välja. Kui andmeid saadetakse, põleb TX LED tuli, kui andmeid vastu võetakse, põleb RX LED tuli./Индикатор (RX: Прием) – Используется для индикации приема данных, если конечно это прописано в программе.Индикатор (TX: Передача) – Используется для индикации передачи данных, если конечно это прописано в программе.
- ATmega328P mikrokontroller, juhib Arduino Uno arendusplaadi tööd.
- Pingeregulaator. Pingeregulaator reguleerib arendusplaadi vooluringi lastavat pinget. Kui pinge on liiga suur, muudab pingeregulaator selle plaadile sobivaks.